This page was generated from notebooks/quickstart.ipynb.
Interactive online version:
![]()
If any part of this notebook is used in your research, please cite with the reference found in README.md.
Quickstart¶
Creating and visualizing a spaghetti.Network object¶
Author: James D. Gaboardi jgaboardi@gmail.com
This notebook provides an explanation of network creation followed by an emprical example for:
Instantiating a network
Allocating observations to a network (snapping points)
Visualizing the original and network-snapped locations with
geopandasandmatplotlib
[1]:
%config InlineBackend.figure_format = "retina"
[2]:
%load_ext watermark
%watermark
Last updated: 2022-11-01T23:13:58.108936-04:00
Python implementation: CPython
Python version : 3.10.6
IPython version : 8.6.0
Compiler : Clang 13.0.1
OS : Darwin
Release : 22.1.0
Machine : x86_64
Processor : i386
CPU cores : 8
Architecture: 64bit
[3]:
import geopandas
import libpysal
import matplotlib
import matplotlib.pyplot as plt
import matplotlib.lines as mlines
import matplotlib_scalebar
from matplotlib_scalebar.scalebar import ScaleBar
import shapely
import spaghetti
%matplotlib inline
%watermark -w
%watermark -iv
Watermark: 2.3.1
libpysal : 4.6.2
geopandas : 0.12.1
matplotlib_scalebar: 0.8.0
json : 2.0.9
shapely : 1.8.5.post1
matplotlib : 3.6.1
spaghetti : 1.6.8
/Users/the-gaboardi/miniconda3/envs/py310_spgh_dev/lib/python3.10/site-packages/spaghetti/network.py:39: FutureWarning: The next major release of pysal/spaghetti (2.0.0) will drop support for all ``libpysal.cg`` geometries. This change is a first step in refactoring ``spaghetti`` that is expected to result in dramatically reduced runtimes for network instantiation and operations. Users currently requiring network and point pattern input as ``libpysal.cg`` geometries should prepare for this simply by converting to ``shapely`` geometries.
warnings.warn(f"{dep_msg}", FutureWarning)
The basics of spaghetti¶
1. Creating a network instance¶
Spatial data science techniques can support many types of statistical analyses of spatial networks themselves, and of events that happen along spatial networks in our daily lives, i.e. locations of trees along foot paths, biking accidents along street networks or locations of coffeeshops along streets. spaghetti provides computational tools to support statistical analysis of such events along many different types of networks. Within spaghetti network objects can be created from a
variety of objects, the most common being shapefiles (read in as file paths) and geopandas.GeoDataFrame objects. However, a network could also be created from libpysal geometries, as demonstrated in the connected components tutorial or a simply as follows:
from libpysal.cg import Point, Chain
import spaghetti
# create the network
ntw = spaghetti.Network(in_data=Chain([Point([1, 1]), Point([2, 1])]))
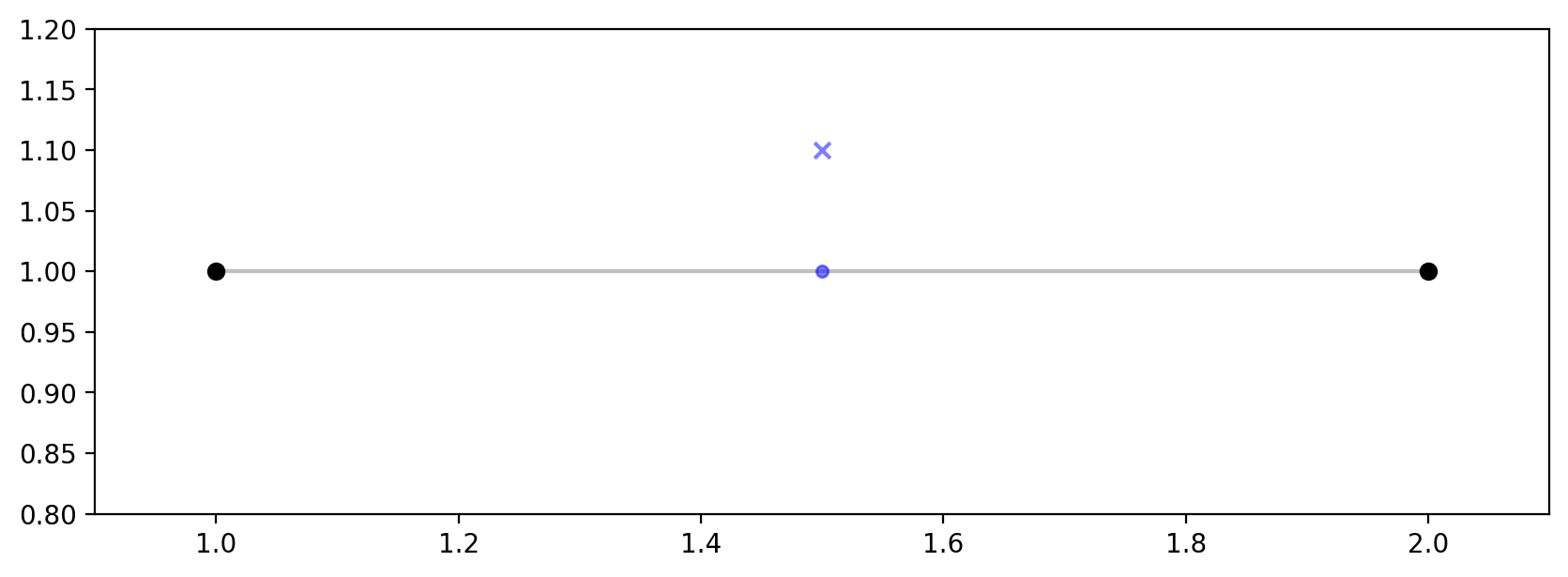
This will create a single-segment network, which is simply one single line. Although the chances of a single-segment network existing in reality are rare, it is useful for demonstration purposes.
The stucture and characterstics of the networks, can be quantitatively described with spaghetti and are topics of research in many areas. However, networks are also utilized as the study space, containing observations or events of interest, in many applications. In these cases the actual objects of interest that will be analysed in the geographic space a network provides, are “network-based events.”
2. Snapping events (points) to a network¶
First, point objects, representing our network-based events, must be snapped to the network for meaningful spatial analysis to be done or models to be constructed. As with spaghetti.Network objects, spaghetti.PointPattern objects can be created from shapefiles and geopandas.GeoDataFrame objects. Furthermore, spaghetti can also simply handle a single libpysal.cg.Pointobject.
Considering the single-segment network above:
# create the point and snap it to the network
ntw.snapobservations(Point([1.5, 1.1]), "point")
At this point the point is associated with the network and, as such, is defined in network space.
3. Visualizating the data¶
Visualization is a cornerstone in communicating scientific data. Within the context of spaghetti elements of the network must be extracted as geopandas.GeoDataFrame objects prior to being visualized with matplotlib. This is shown in the following block of code, along with network creation and point snapping.
[4]:
from libpysal.cg import Point, Chain
import spaghetti
# create the network
ntw = spaghetti.Network(in_data=Chain([Point([1, 1]), Point([2, 1])]))
# create the point and snap it to the network
ntw.snapobservations(Point([1.5, 1.1]), "point")
# network nodes and edges
vertices_df, arcs_df = spaghetti.element_as_gdf(ntw, vertices=True, arcs=True)
# true and snapped location of points
point_df = spaghetti.element_as_gdf(ntw, pp_name="point", snapped=False)
snapped_point_df = spaghetti.element_as_gdf(ntw, pp_name="point", snapped=True)
# plot the network and point
base = arcs_df.plot(figsize=(10,10), color="k", alpha=0.25, zorder=0)
vertices_df.plot(ax=base, color="k", alpha=1)
kwargs = {"ax":base, "alpha":0.5, "zorder":1}
point_df.plot(color="b", marker="x", **kwargs)
snapped_point_df.plot(color="b", markersize=20, **kwargs)
plt.xlim(.9,2.1); plt.ylim(.8,1.2);
Network creation, observation snapping, and visualization are further reviewed below for an example with empirical datasets available libpysal.
Empirical Example¶
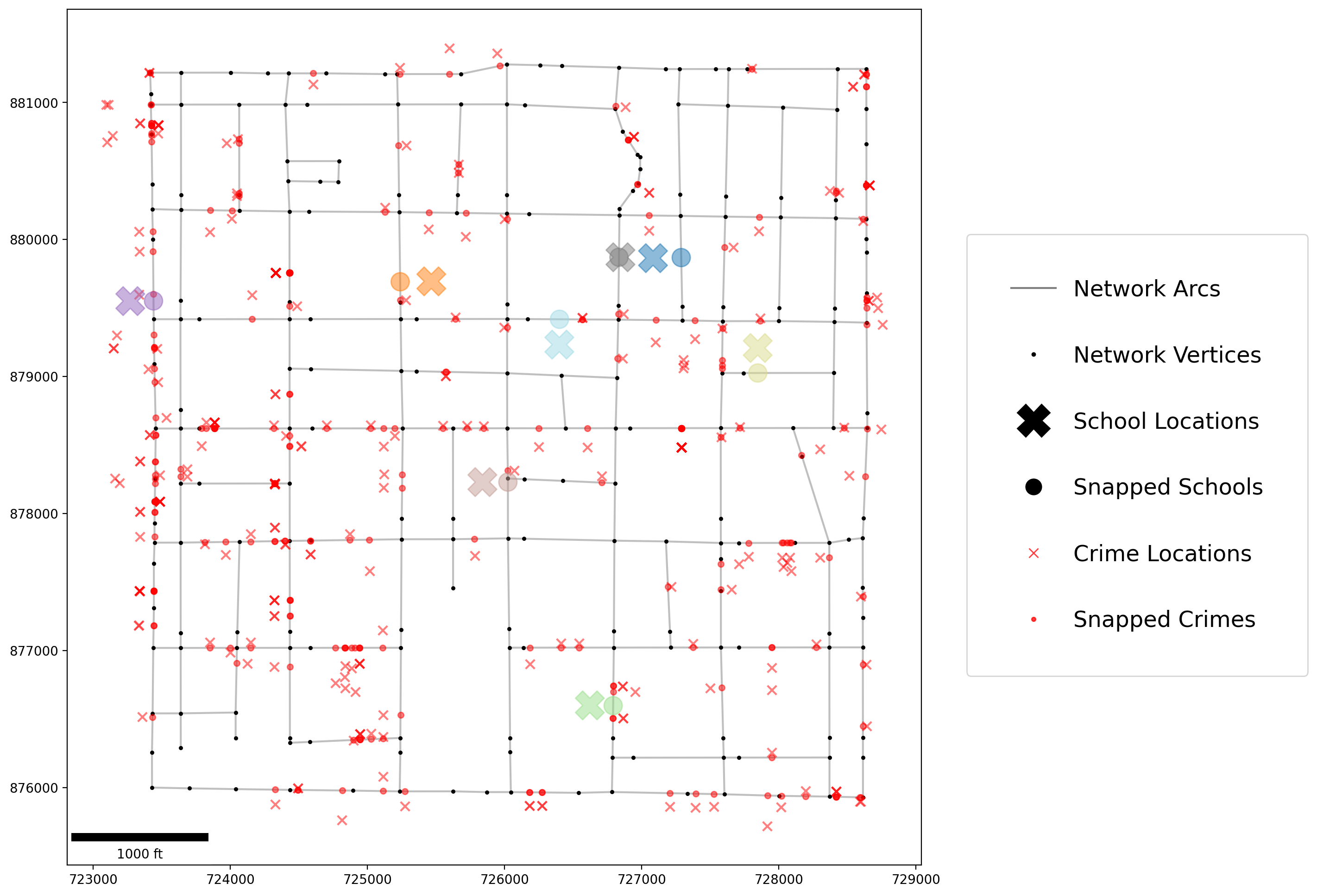
In the following we will walk through an empirical example, visually comparing school locations with a network to crimes committed within the same network.
1. Instantiating a spaghetti.Network object¶
Instantiate the network from a .shp file¶
[5]:
ntw = spaghetti.Network(in_data=libpysal.examples.get_path("streets.shp"))
2. Allocating observations to a network:¶
Schools without attributes¶
[6]:
ntw.snapobservations(
libpysal.examples.get_path("schools.shp"), "schools", attribute=False
)
True vs. snapped school coordinates comparison: spaghetti.Network attributes¶
[7]:
print("observation 1\ntrue coords:\t%s\nsnapped coords:\t%s" % (
ntw.pointpatterns["schools"].points[0]["coordinates"],
ntw.pointpatterns["schools"].snapped_coordinates[0]
))
observation 1
true coords: (727082.0462136, 879863.260705768)
snapped coords: (727287.6644417326, 879867.3863186113)
Crimes with attributes¶
[8]:
ntw.snapobservations(
libpysal.examples.get_path("crimes.shp"), "crimes", attribute=True
)
True vs. snapped crime coordinates comparison: spaghetti.Network attributes¶
[9]:
print("observation 1\ntrue coords:\t%s\nsnapped coords:\t%s" % (
ntw.pointpatterns["crimes"].points[0]["coordinates"],
ntw.pointpatterns["crimes"].snapped_coordinates[0]
))
observation 1
true coords: (727913.0000000029, 875720.9999999977)
snapped coords: (727919.2473619275, 875942.4986759046)
3. Visualizing original and snapped locations¶
True and snapped school locations¶
[10]:
true_schools_df = spaghetti.element_as_gdf(
ntw, pp_name="schools", snapped=False
)
snapped_schools_df = spaghetti.element_as_gdf(
ntw, pp_name="schools", snapped=True
)
True vs. snapped school coordinates comparison: geopandas.GeoDataFrame¶
[11]:
# Compare true point coordinates & snapped point coordinates
print("observation 1\ntrue coords:\t%s\nsnapped coords:\t%s" % (
true_schools_df.geometry[0].coords[:][0],
snapped_schools_df.geometry[0].coords[:][0]
))
observation 1
true coords: (727082.0462136, 879863.260705768)
snapped coords: (727287.6644417326, 879867.3863186113)
True and snapped crime locations¶
[12]:
true_crimes_df = spaghetti.element_as_gdf(
ntw, pp_name="crimes", snapped=False
)
snapped_crimes_df = spaghetti.element_as_gdf(
ntw, pp_name="crimes", snapped=True
)
True vs. snapped crime coordinates comparison: geopandas.GeoDataFrame¶
[13]:
print("observation 1\ntrue coords:\t%s\nsnapped coords:\t%s" % (
true_crimes_df.geometry[0].coords[:][0],
snapped_crimes_df.geometry[0].coords[:][0]
))
observation 1
true coords: (727913.0000000029, 875720.9999999977)
snapped coords: (727919.2473619275, 875942.4986759046)
Create geopandas.GeoDataFrame objects of the vertices and arcs¶
[14]:
# network nodes and edges
vertices_df, arcs_df = spaghetti.element_as_gdf(ntw, vertices=True, arcs=True)
Create legend patches for the matplotlib plot¶
[15]:
# create legend arguments and keyword arguments for matplotlib
args = [], []
kwargs = {"c":"k"}
# set arcs legend entry
arcs = mlines.Line2D(*args, **kwargs, label="Network Arcs", alpha=0.5)
# update keyword arguments for matplotlib
kwargs.update({"lw":0})
# set vertices legend entry
vertices = mlines.Line2D(
*args, **kwargs, ms=2.5, marker="o", label="Network Vertices"
)
[16]:
# set true school locations legend entry
tschools = mlines.Line2D(
*args, **kwargs, ms=25, marker="X", label="School Locations"
)
# set network-snapped school locations legend entry
sschools = mlines.Line2D(
*args, **kwargs, ms=12, marker="o", label="Snapped Schools"
)
[17]:
# update keyword arguments for matplotlib
kwargs.update({"c":"r", "alpha":0.75})
# set true crimes locations legend entry
tcrimes = mlines.Line2D(
*args, **kwargs, ms=7, marker="x", label="Crime Locations"
)
# set network-snapped crimes locations legend entry
scrimes = mlines.Line2D(
*args, **kwargs, ms=3, marker="o", label="Snapped Crimes"
)
[18]:
# combine all legend patches
patches = [arcs, vertices, tschools, sschools, tcrimes, scrimes]
Plotting geopandas.GeoDataFrame objects¶
[19]:
# set the streets as the plot base
base = arcs_df.plot(color="k", alpha=0.25, figsize=(12, 12), zorder=0)
# create vertices keyword arguments for matplotlib
kwargs = {"ax":base}
vertices_df.plot(color="k", markersize=5, alpha=1, **kwargs)
# update crime keyword arguments for matplotlib
kwargs.update({"alpha":0.5, "zorder":1})
true_crimes_df.plot(color="r", marker="x", markersize=50, **kwargs)
snapped_crimes_df.plot(color="r", markersize=20, **kwargs)
# update schools keyword arguments for matplotlib
kwargs.update({"cmap":"tab20", "column":"id", "zorder":2})
true_schools_df.plot(marker="X", markersize=500, **kwargs)
snapped_schools_df.plot(markersize=200, **kwargs)
# add scale bar
kw = {"units":"ft", "dimension":"imperial-length", "fixed_value":1000}
base.add_artist(ScaleBar(1, location="lower left", box_alpha=.75, **kw))
# add legend
plt.legend(
handles=patches,
fancybox=True,
framealpha=0.8,
scatterpoints=1,
fontsize="xx-large",
bbox_to_anchor=(1.04, 0.75),
borderpad=2.,
labelspacing=2.
);